
The purpose is to develop an intelligent robotic system for autonomous luggage trolley collection and arrangement in densely crowded environments such as airports. The robot finds, identifies and collects used luggage trolleys in the environment and transports them to designated locations for people to use.


ShenCai Robot, a fully automatic, intelligent and interactive nucleic acid testing robot, is led and developed by the team of Prof. Max Q.-H. Meng(Fellow of the Canadian Academy of Engineering) of Shenzhen Key Laboratory of Robotics Perception and Intelligence, Southern University of Science and Technology, supported by Shenzhen Science and Technology Innovation Commission.
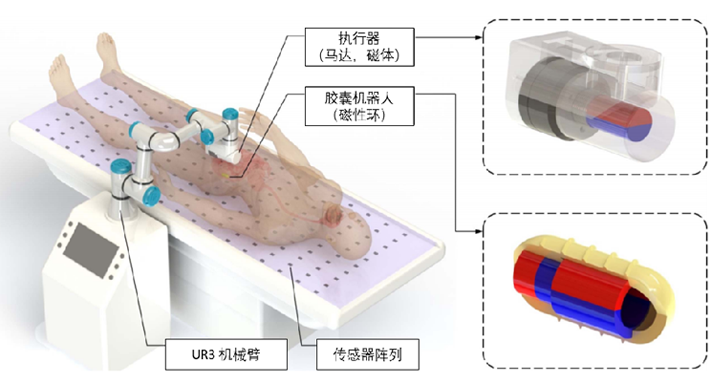
Colon diseases, especially colon cancer, have been affecting human health worldwide. At the same time, medical robot products are immature and the output is minimal in China, while the related products in foreign countries are expensive. This is incompatible with our country's existing medical conditions, purchasing power, and patient's economic affordability.
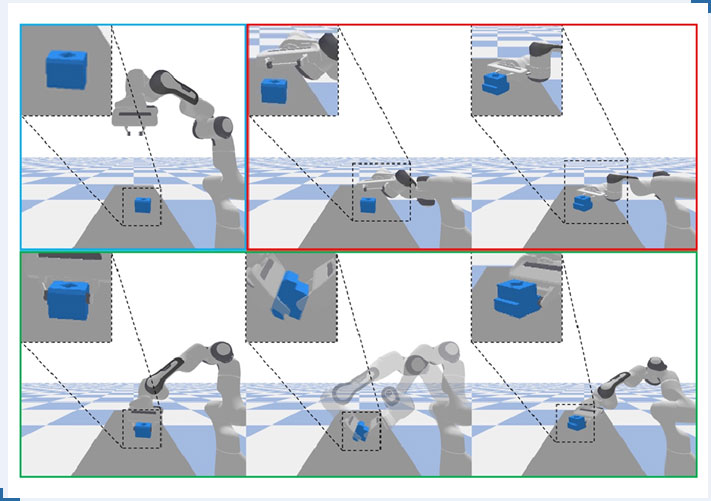
Planar manipulation means manipulating objects on a plane. This process involves object reorientation, which is vital for robots to rotate objects to desired poses. Typical tasks, such as packing objects, assembly, and using tools [3], require robots to arrange objects in specific poses.
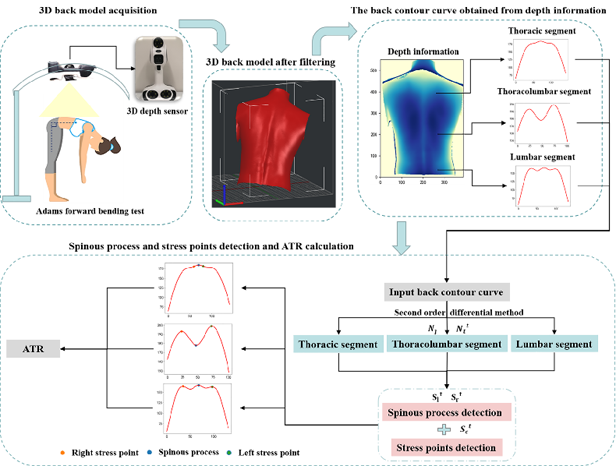
AIS is the most common 3D vertebral deformity, affecting 0.5Ͽo 5.2Ͽf the adolescent population worldwide. AIS affects aesthetics and becomes a physical and mental disorder in adolescent patients. Therefore, early detection of AIS leads to better treatment of AIS and prevention of further deterioration.
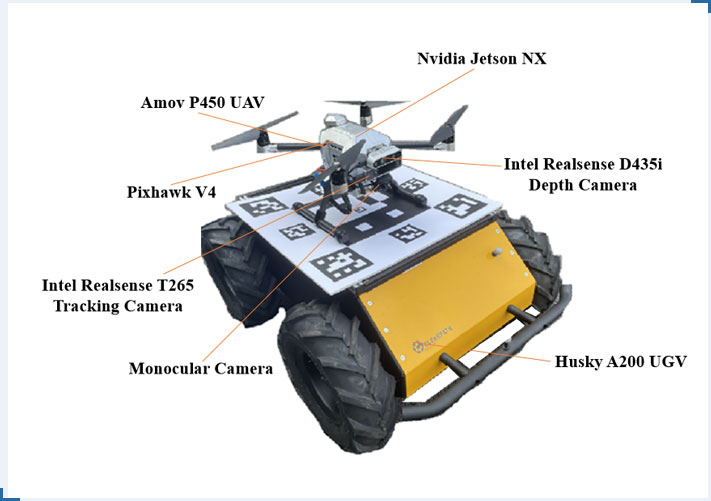
The objective is to develop a heterogeneous robot collaborative system composed of a quadrotor unmanned aerial vehicle(UAV) and an unmanned ground vehicle(UGV). The “Air-Ground Collaborative” robot system combines the advantages of the UGV‘s large load and long endurance with the agility and wide coverage of the quadrotor UAV.

