Planar Manipulation via Learning Regrasping
—— Shenzhen Key Laboratory of Robotics Perception and Intelligence [P]
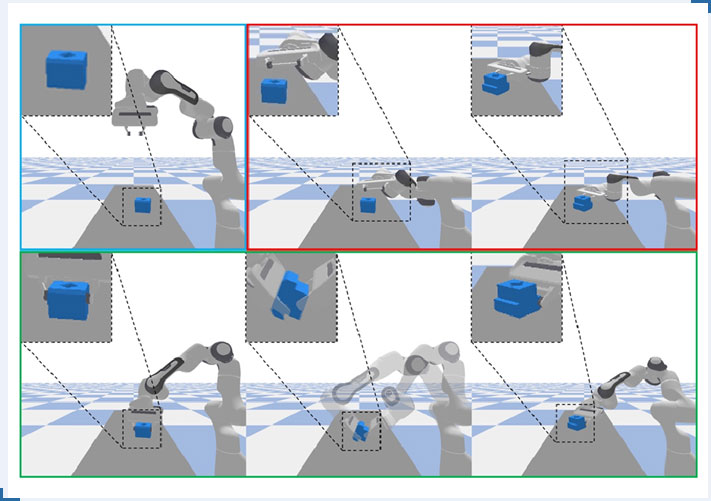
Planar manipulation means manipulating objects on a plane. This process involves object reorientation, which is vital for robots to rotate objects to desired poses. Typical tasks, such as packing objects, assembly, and using tools [3], require robots to arrange objects in specific poses. When the robot cannot reorient an object to the goal pose with a single pick-rotate-and-place step, regrasping is essential for reorienting objects. Different placements of objects can provide robots with alternative grasp configurations, which can help reorient objects that require multiple pick-rotate-and-place steps due to the constraints of the environment.
In this work, our goal is to generate diverse placements of objects on the plane using deep neural networks. We propose a pipeline with the stages of orientation generation, position refinement, and placement discrimination to obtain accurate and diverse stable placements based on the perception of point clouds. A large-scale dataset containing collected placements and contact information between objects is also created to train our neural network models. The comparison experiments demonstrate that our method outperforms the start-of-the-art and achieves the average accuracy rate of 90% and the average diversity rate of 80% on the generated placements. Meanwhile, the real-robot experiments validate that our method can generate stable placements for planar manipulation tasks.