“Air-Ground Collaborative”Heterogeneous Robotic System for UAV and UGV
——Shenzhen Key Laboratory of Robotics Perception and Intelligence [P]
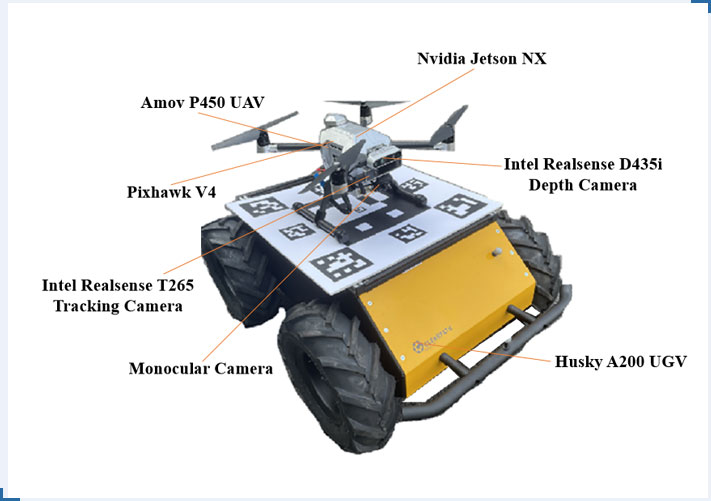
The objective is to develop a heterogeneous robot collaborative system composed of a quadrotor unmanned aerial vehicle(UAV) and an unmanned ground vehicle(UGV). The “Air-Ground Collaborative” robot system combines the advantages of the UGV‘s large load and long endurance with the agility and wide coverage of the quadrotor UAV. Such a system can be widely used in ecological monitoring, last-mile delivery, infrastructure inspection and other fields. In this project, the drone first takes off from the unmanned vehicle and performs tasks such as taking pictures; after the task is completed, the drone locates the landing area on the UGV and plans the path; finally the drone lands steadily on the mobile vehicle. The main research contents include: unmanned vehicle landing platform positioning system based on fiducial marker, UAV motion planning method based on trajectory optimization, UAV control method based on cascade PID, etc.